KINGROON KP3S Titan Aero mount の組み立て方

配布先
Thingiverse
必要なもの

・Titan Aero 一式

・アルミ合金製モーターブラケット 1個
(Aluminum Nema17 Motor Mount Bracket)

・4020ブロアファン(24V) 1個

・ネジ類
■MGN12に固定する用
皿ネジ(Countersunk screw) M3 x 10mm 4本
■アルミブラケット固定用
キャップボルト M3 x 10mm 4本
■Titan Aero固定用
(付属しているネジの長さを計測してfuzokusitenai 足りない分だけ買ってください)
キャップボルト M3 x 35mm 3本
キャップボルト M3 x 25mm 1本
キャップボルト M3 x 12mm(10mmで代用可能) 1本
■4025ファン固定用
キャップボルト M3 x 20mm 1本
■ダクトパーツ固定用
キャップボルト M3 x 15mm 1本(または2本)
■ナット
M3 10個ぐらい

・接着剤


・ビニタイまたは結束バンド
印刷
モーター接触部品もファンダクトも耐熱性が求められるのでPLA樹脂不可です
すべての部品をABSで動作確認しています
PETGなどでも大丈夫かと思いますが私の方では未確認です
すべて画像の向きで印刷してください
ビルドプレート投影(touching build plate)でサポートを付けてください
■A部品

インフィル密度50%で動作確認をしています
25%でも問題なさそうですが丈夫に越したことはありません
■B部品

インフィル密度25%で動作確認をしています
■C部品
インフィル密度25%で動作確認をしています
ストック版とVolcano版と2種類あり、説明はストック版で行います
組み立て
E3D公式のTitan Aeroドキュメントは先に一読しておいてください
(ただしこのモデルは手持ちのTitan Aeroクローンを前提に設計しています)

まずは仮組みをします
各モデル穴径が小さい場合は3mmや3.2mmのドリルで予め揉んでおきましょう


電ドラボールがあるととても便利
六角レンチビットやらドリルビットもプラスチック相手なら十分使えるので本当に買ってよかった

ベッセル(VESSEL) 電動 ボールグリップ ドライバー ビット1本付 電ドラボール 220USB-1




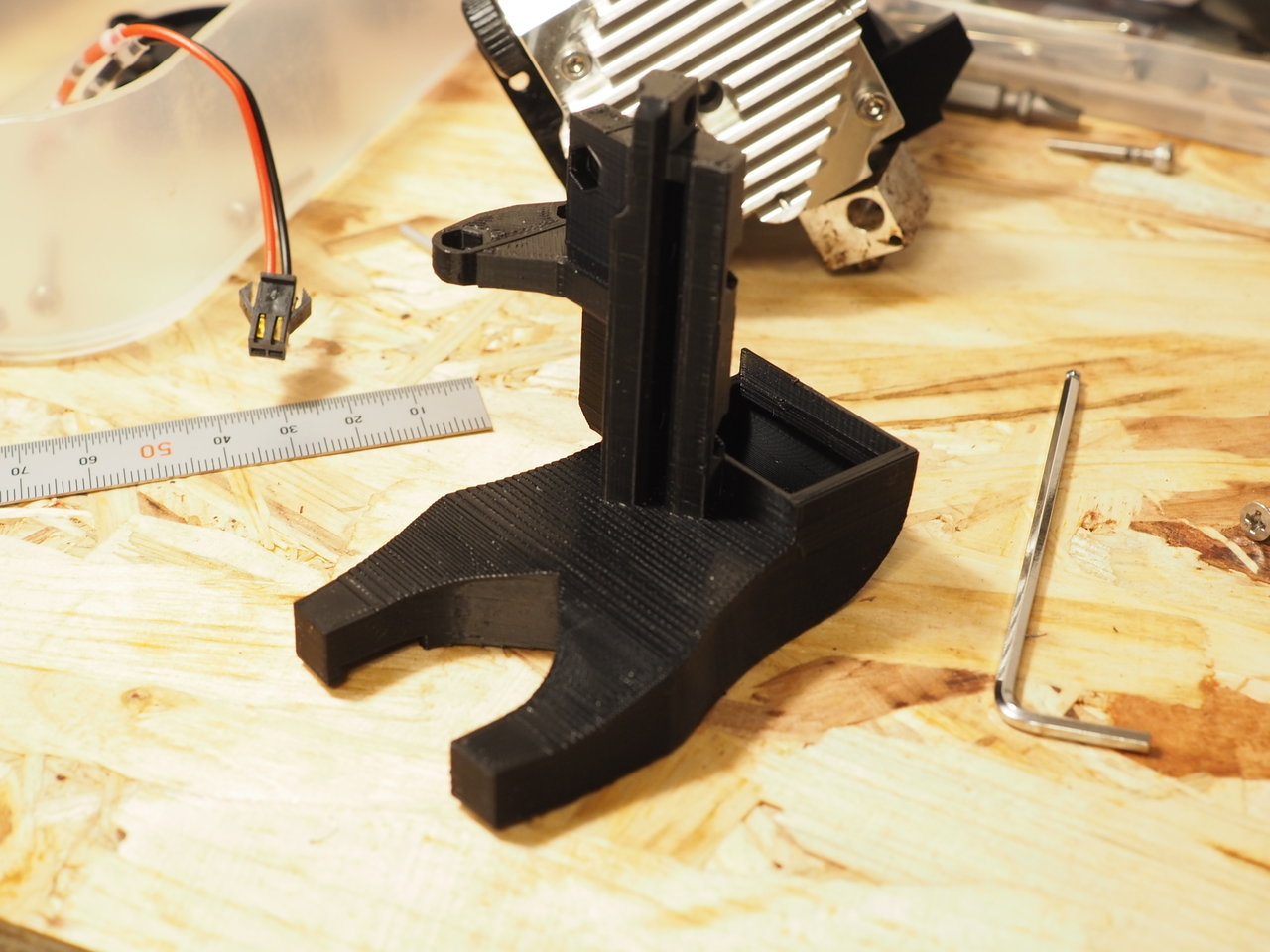
モーターのコネクタは上側にします

左上に25mmのネジを仮止めしてから右下のネジを本締めします
右下は12mm(10mm代用可能)です

モーターのピニオンを忘れないでください
 ヒートシンクをネジで固定します
ヒートシンクをネジで固定します

右下が25mmでほか3本が35mmです

縦に並んだ下側は省略して構いません

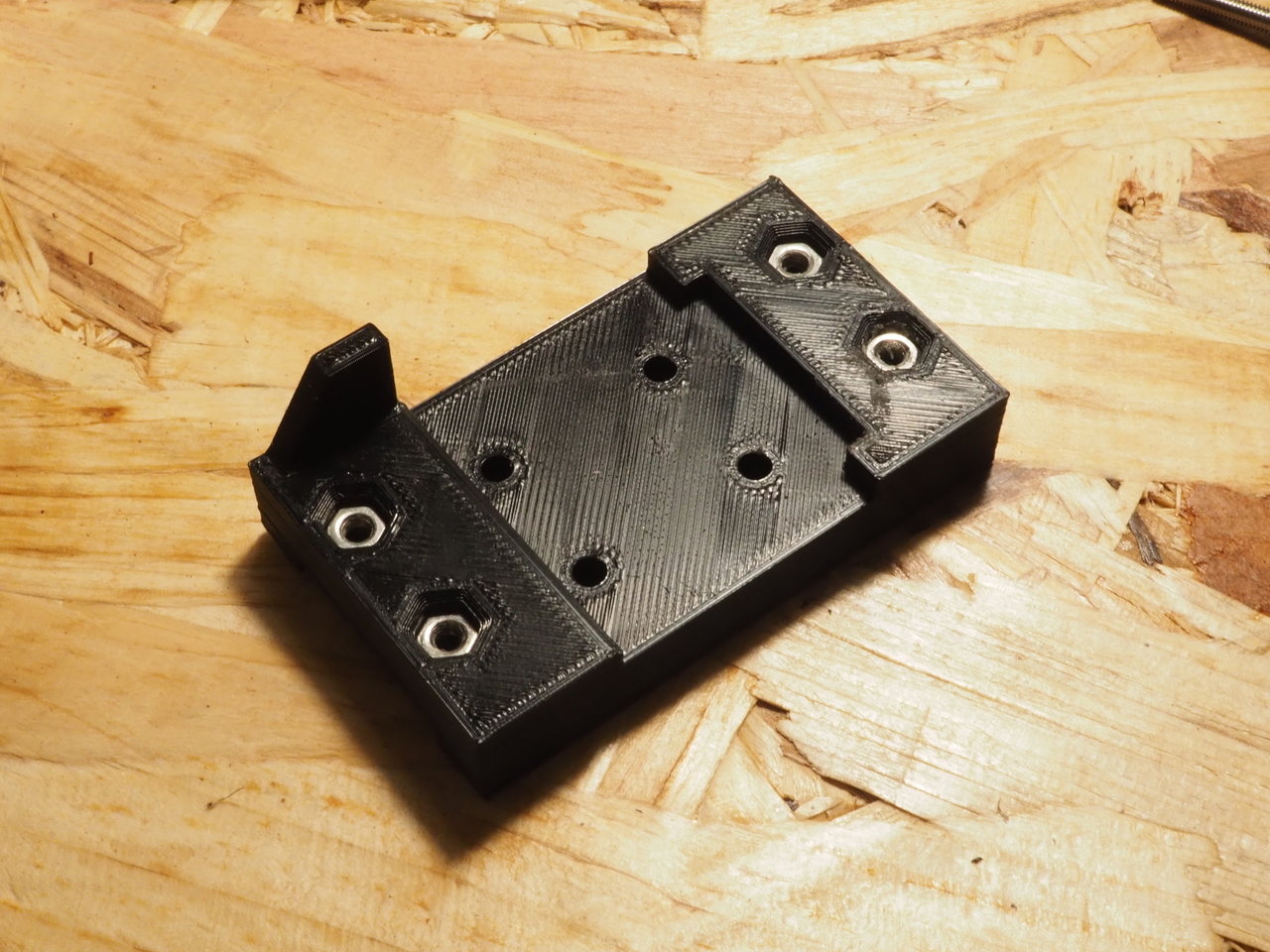
Titan Aeroにネジで固定してください
上下に2つ作りましたが上側のネジだけで十分なので下側は省略しても構いません


(そこら辺にあった灰色のシールを貼りました)

ブロックを加熱し、ヒートブレイク、ブロック、ノズルをマーキング位置で本締めします









ファン電線のコネクタ化は下記の別記事で解説してます



完成


3Dbenchyは特に文句つけるところが無い
パリッとしたものが出た

Volcano版で出した50%サイズのPhil A Ment(70mm/s)
速度を上げたのでリギングが少し出ている
速度を上げたのでリギングが少し出ている
それ以外は綺麗
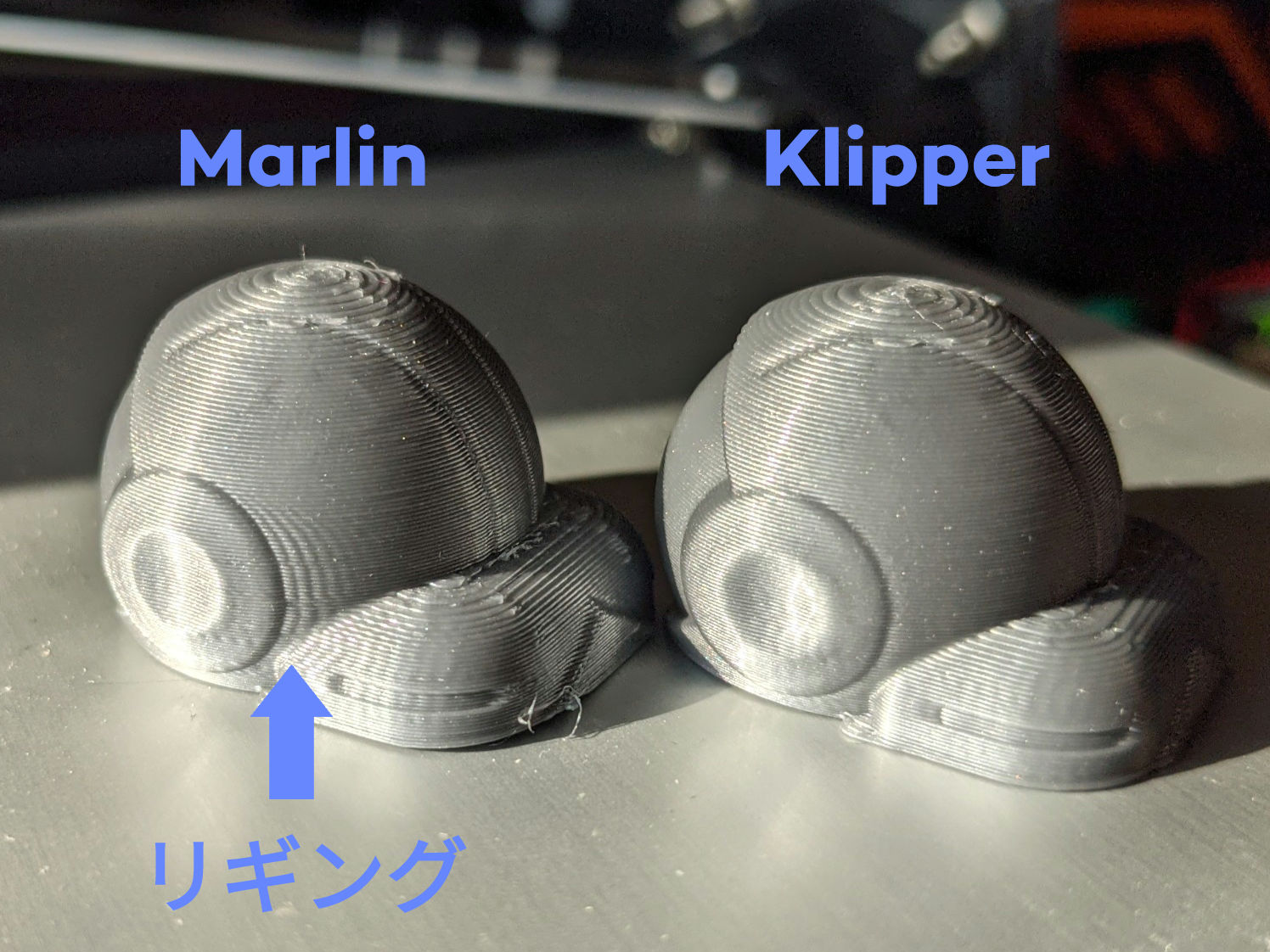

比較画像は同じハードウェア、同じ設置場所、同じGコードで実行している
マジでファームウェア意外に相違点がない

2ショットで記念撮影
メモ
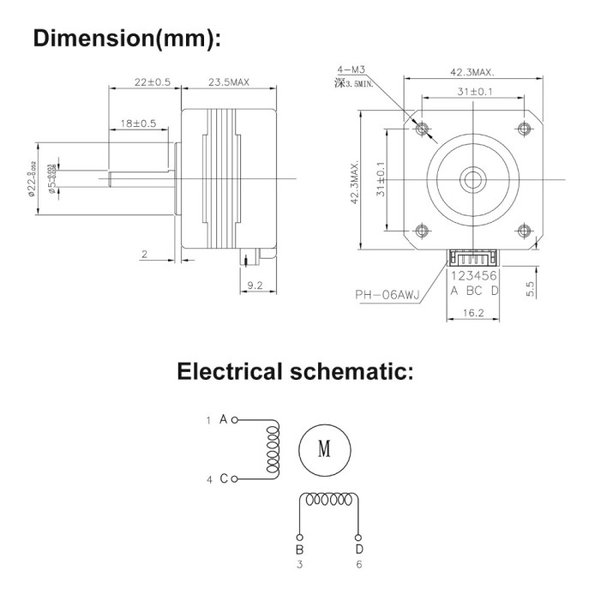
■モーターの配線ピンアサインについて
今回私が購入したモーターはコイルのペアとピンアサインの配置が異なっていたので変更が必要でした
モータードライバーは誤配線通電で壊れることもあるのでデータシートを見て慎重に行いましょう
(どのみちモータードライバーは壊れやすいので予備で1個買っておいたほうがいいです)
実例で説明すると、私がMellowストアから買ったTitanは17HS4023が使われており、次のようなピンアサインでした
モーターの1番ピン(A)にモータードライバの1A
モーターの3番ピン(B)にモータードライバの2A
モーターの4番ピン(C)にモータードライバの1B
モーターの6番ピン(D)にモータードライバの2B
を接続すれば正しく動きます


■ファームウェアについて
ノズルのマウントポジションが同じなので純正ファームウェアのまま使用しても問題ありません
BLTouchのオフセットポジションは
X 18.0
Y -47.0
です
(2021/03/28追記)
Nehilo氏がカスタムファームウェアの公開を停止したので該当部分を削除
■リトラクションについて
ヒートシンクをエクストルーダーと一体化してフィラメントパスを短くする設計になっているので
リトラクション距離は非常に短くなります
E3Dのドキュメントではリトラクションは0.5mm前後で調整し、2mm以上にしないよう書かれております
私の環境でも0.4mmか0.3mmぐらいが最適でした



コメント
コメントを投稿